Accueil / Accès directs / Accès utilisateurs / Aperçu d'article
Expérimentation de désherbage pré-levée avec le Farmdroid

Le robot Farmdroid de part sa légèreté et son travail superficiel permet d'intervenir précocement dans le désherbage de la parcelle. L'ITB et la Chambre d'agriculture Ile-de-France ont testé cette année l'intérêt du désherbage de pré-levée sur les populations d'adventices.
Un semis début avril avec le robot
Pour semer les 10 ha de la parcelle, le robot a échelonné le semis du 8 au 11 avril à raison d'une vitesse d'avancement de 700 m/h. La population semée théorique était de 110 000 betteraves/ha. La profondeur de semis a été définie à 3 cm pour semer dans le frais et préparer les opérations de binage à l'aveugle. L'ITB a rédigé cette année un "Pense bête semis Farmdroid" téléchargeable à droite de cet article, détaillant la manière de paramétrer le semis avec le robot et les marges de sécurité.

Un binage à l'aveugle qui n'a pas fait ses preuves dans notre essai
4 modalités ont été testées 8 jours après le semis :
- Sans binage à l'aveugle
- Binage à 1 cm sous la surface au niveau du rang et 2 cm sous la surface hors rang
- Binage à 2 cm sur rang et inter-rang
16 cadres de 0,25 m2 ont été réalisés dans chaque modalité pour évaluer la population d'adventices. Les résultats synthétiques sont disponibles ci-dessous.
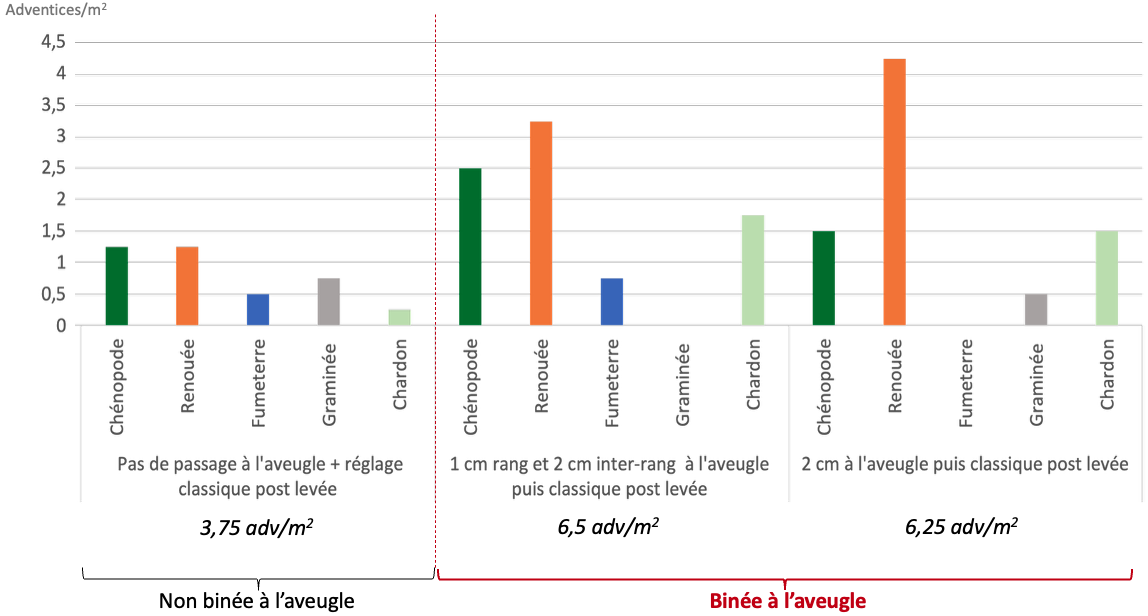
Davantage d'adventices ont été dénombrées dans les modalités binées à l'aveugle que dans la modalité non travaillée après le semis. Le passage pré-levée a peut-être créé des conditions propices à la germination pour les graines d'adventices en dormance dans le sol. Attention toutefois, ces résultats sont à nuancer, on ne peut exclure que le stock semencier adventice initial dans les bandes binées à l'aveugle ait été plus important que dans le témoin non travaillé.
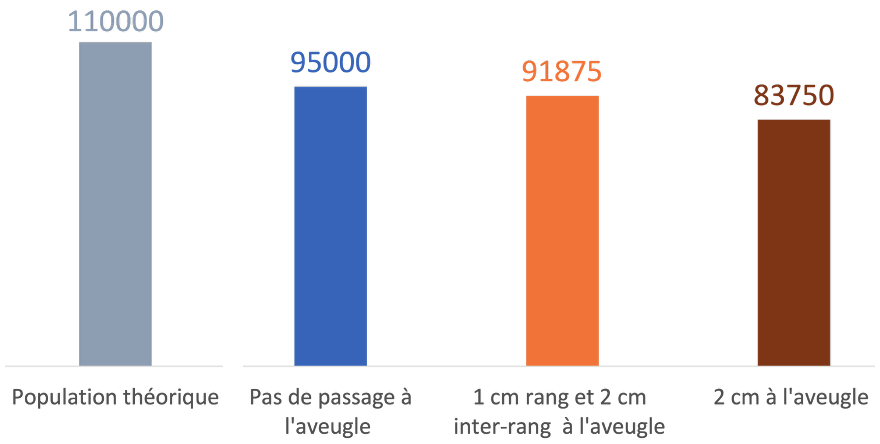
Concernant les levées des betteraves, on constate que les populations sont plus faibles dans les modalités binées à l'aveugle. Ce passage en pré-levée a aussi pour effet de remettre de la terre sur le rang et d'augmenter artificiellement la profondeur de semis, déjà relativement profonde. Les populations sont particulièrement plus faibles pour la modalité où le rang à été travaillé à 2 cm de profondeur.
Conduite globale du robot
La conduite globale du robot s'est effectuée selon le schéma présenté ci-dessous, en fonction des précipitations (en mm) indiquées :
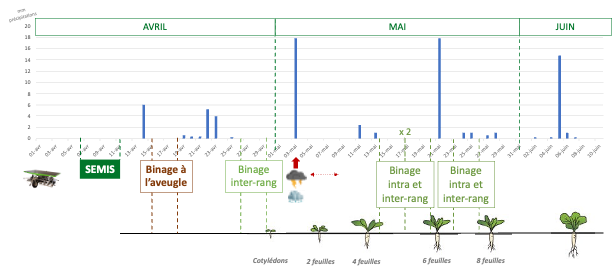
La météo a malheureusement rendu impossible les premiers passages précoces de couteaux dans le rang, en post levée. A partir du stade 4 feuilles, les passages du robot ont été cadencés pour intervenir régulièrement jusqu'au stade 8 feuilles. L'état de la parcelle après les opérations de désherbage est peu satisfaisant même pour une parcelle bio. Le robot n'a notamment pas su maitriser les populations de chénopodes. Les couteaux de désherbage ne travaillant pas totalement la largeur de l'intra-rang (espace entre 2 betteraves successives), certaines adventices se sont développées directement au pied des betteraves, les mettant fortement en concurrence (avec un impact direct probable sur le rendement racine), comme illustré ci-dessous.

L'ITB continuera de tester le robot Farmdroid, ses atouts et ses limites, pour les prochaines campagnes betteravières.

Par :
Thomas LEBORGNE
Chargé de mission Agroéquipement - Modes de production